Classes | |
| class | RoboAPIImplementor |
| class | RoboSimExecutionException |
| class | RobotData |
| class | SimGridAllyDeterminant |
| class | SimGridCell |
Public Member Functions | |
| Robot.GridCell[][] | getWorldGrid () |
| String | getOccupantPlayer (Robot.GridCell to_convert) |
| RoboSim (String[] combatants, int initial_robots_per_combatant, int skill_points, int length, int width, int obstacles) throws RoboSimExecutionException | |
| String | executeSingleTimeStep () throws RoboSimExecutionException |
Private Member Functions | |
| SimGridCell[][] | getSubGrid (int x_left, int y_up, int x_right, int y_down) |
Static Private Member Functions | |
| static Robot.GridCell[][] | sanitizeGrid (SimGridCell[][] simgrid, String player) |
| static Robot.Robot_Specs | checkSpecsValid (Robot.Robot_Specs proposed, String player, int skill_points) throws RoboSimExecutionException |
Private Attributes | |
| final int | WALL_HEALTH = 10 |
| final int | WALL_DEFENSE = 10 |
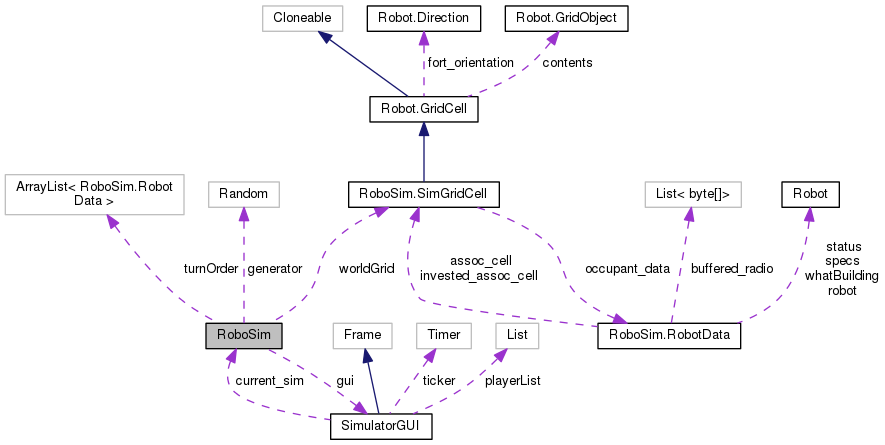
| SimGridCell[][] | worldGrid |
| ArrayList< RobotData > | turnOrder |
| int | turnOrder_pos |
| SimulatorGUI | gui |
Detailed Description
Definition at line 8 of file RoboSim.java.
Constructor & Destructor Documentation
| RoboSim.RoboSim | ( | String[] | combatants, |
| int | initial_robots_per_combatant, | ||
| int | skill_points, | ||
| int | length, | ||
| int | width, | ||
| int | obstacles | ||
| ) | throws RoboSimExecutionException |
Constructor for RoboSim:
- Parameters
-
combatants array of String objects containing the names of the Robot classes for each combatant initial_robots_per_combatant how many robots each team starts out with skill_points skill points per combatant length length of arena width width of arena obstacles number of obstacles on battlefield
Definition at line 185 of file RoboSim.java.
References checkSpecsValid(), Robot.createRobot(), RoboSim.RobotData.robot, turnOrder, turnOrder_pos, WALL_HEALTH, and worldGrid.

Member Function Documentation
|
staticprivate |
Definition at line 167 of file RoboSim.java.
Referenced by RoboSim.RoboAPIImplementor.finalizeBuilding(), and RoboSim().

| String RoboSim.executeSingleTimeStep | ( | ) | throws RoboSimExecutionException |
Executes one timestep of the simulation.
- Returns
- the winner, if any, or null
Definition at line 1031 of file RoboSim.java.
References RoboSim.RobotData.status, turnOrder, and turnOrder_pos.
| String RoboSim.getOccupantPlayer | ( | Robot.GridCell | to_convert | ) |
SimulatorGUI needs to see who owns the robots in the cells This is a hack to allow this by downcasting the passed GridCell to SimGridCell and extracting the data.
Definition at line 104 of file RoboSim.java.
|
private |
Helper method to retrieve a subgrid of the world grid
- Parameters
-
x_left left x coordinate (inclusive) y_up smaller y coordinate (inclusive) x_right right x coordinate (inclusive) y_down larger y coordinate (inclusive)
- Returns
- subgrid of the world grid (NOT copied or sanitized)
Definition at line 119 of file RoboSim.java.
References worldGrid.
Referenced by RoboSim.RoboAPIImplementor.getVisibleNeighborhood(), and RoboSim.RoboAPIImplementor.getWorld().

| Robot.GridCell [][] RoboSim.getWorldGrid | ( | ) |
This is so SimulatorGUI can get a copy of world
Definition at line 99 of file RoboSim.java.
References worldGrid.
|
staticprivate |
Sanitizer to create a GridCell[][] 2D array to give to client.
- Parameters
-
simgrid SimGridCell 2D array with cells to sanitize player String containing player's name. Used to create sanitized grid as it would be seen from player's perspective.
- Returns
- sanitized grid or subgrid from player's perspective
Definition at line 139 of file RoboSim.java.
References Robot.GridCell.contents, RoboSim.SimGridCell.occupant_data, RoboSim.RobotData.player, and RoboSim.SimGridCell.wallforthealth.
Referenced by RoboSim.RoboAPIImplementor.getVisibleNeighborhood(), and RoboSim.RoboAPIImplementor.getWorld().

Member Data Documentation
|
private |
Definition at line 96 of file RoboSim.java.
|
private |
Definition at line 94 of file RoboSim.java.
Referenced by executeSingleTimeStep(), RoboSim.RoboAPIImplementor.finalizeBuilding(), RoboSim.RoboAPIImplementor.processAttack(), RoboSim(), and RoboSim.RoboAPIImplementor.sendMessage().
|
private |
Definition at line 95 of file RoboSim.java.
Referenced by executeSingleTimeStep(), RoboSim.RoboAPIImplementor.processAttack(), and RoboSim().
|
private |
Definition at line 90 of file RoboSim.java.
|
private |
Definition at line 89 of file RoboSim.java.
Referenced by RoboSim.RoboAPIImplementor.finalizeBuilding(), and RoboSim().
|
private |
Definition at line 93 of file RoboSim.java.
Referenced by RoboSim.RoboAPIImplementor.capsuleAttack(), RoboSim.RoboAPIImplementor.charge(), RoboSim.RoboAPIImplementor.drop_capsule(), getSubGrid(), RoboSim.RoboAPIImplementor.getVisibleNeighborhood(), RoboSim.RoboAPIImplementor.getWorld(), getWorldGrid(), RoboSim.RoboAPIImplementor.meleeAttack(), RoboSim.RoboAPIImplementor.move(), RoboSim.RoboAPIImplementor.pick_up_capsule(), RoboSim.RoboAPIImplementor.rangedAttack(), RoboSim(), RoboSim.RoboAPIImplementor.scanEnemy(), RoboSim.RoboAPIImplementor.sendMessage(), and RoboSim.RoboAPIImplementor.setBuildTarget().
The documentation for this class was generated from the following file:
