SimulatorGUI Class Reference
#include <SimulatorGUI.hpp>
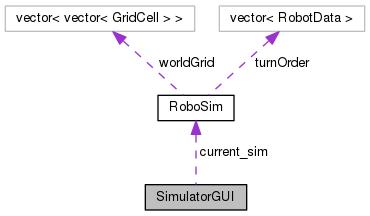
Collaboration diagram for SimulatorGUI:
Public Member Functions | |
| SimulatorGUI (int gridX, int gridY, int skillz, int bots_per_player, int obstacles_) | |
| bool | do_timestep () |
Private Attributes | |
| int | initial_robots_per_combatant |
| int | skill_points |
| int | length |
| int | width |
| int | obstacles |
| RoboSim | current_sim |
Detailed Description
SimulatorGUI: Main GUI class.
ASCII art for now.
Definition at line 9 of file SimulatorGUI.hpp.
Constructor & Destructor Documentation
|
inline |
Definition at line 23 of file SimulatorGUI.hpp.
23 : length(gridX),width(gridY),skill_points(skillz),initial_robots_per_combatant(bots_per_player),obstacles(obstacles_),current_sim(initial_robots_per_combatant,skill_points,length,width,obstacles) { }
int initial_robots_per_combatant
Definition: SimulatorGUI.hpp:13
Member Function Documentation
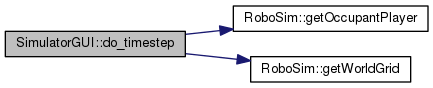
| bool SimulatorGUI::do_timestep | ( | ) |
Definition at line 32 of file SimulatorGUI.cpp.
References robot_api::BLOCKED, current_sim, robot_api::DOWN, robot_api::FORT, RoboSim::getOccupantPlayer(), RoboSim::getWorldGrid(), robot_api::LEFT, robot_api::RIGHT, robot_api::SELF, robot_api::UP, and robot_api::WALL.
Definition: robot_api.hpp:68
Definition: robot_api.hpp:65
Definition: robot_api.hpp:65
Definition: robot_api.hpp:68
int getOccupantPlayer(const GridCell &cell) const
Definition: RoboSim.hpp:54
Definition: robot_api.hpp:65
Definition: robot_api.hpp:68
Definition: robot_api.hpp:65
Definition: robot_api.hpp:68
Here is the call graph for this function:
Member Data Documentation
|
private |
Definition at line 20 of file SimulatorGUI.hpp.
Referenced by do_timestep().
|
private |
Definition at line 13 of file SimulatorGUI.hpp.
|
private |
Definition at line 15 of file SimulatorGUI.hpp.
|
private |
Definition at line 17 of file SimulatorGUI.hpp.
|
private |
Definition at line 14 of file SimulatorGUI.hpp.
|
private |
Definition at line 16 of file SimulatorGUI.hpp.
The documentation for this class was generated from the following files:
